 GDU
GDU
 ອູ້ຟລີ
ອູ້ຟລີ ດີເຈໄອ
ດີເຈໄອ MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN ກະດູກງູ
ກະດູກງູ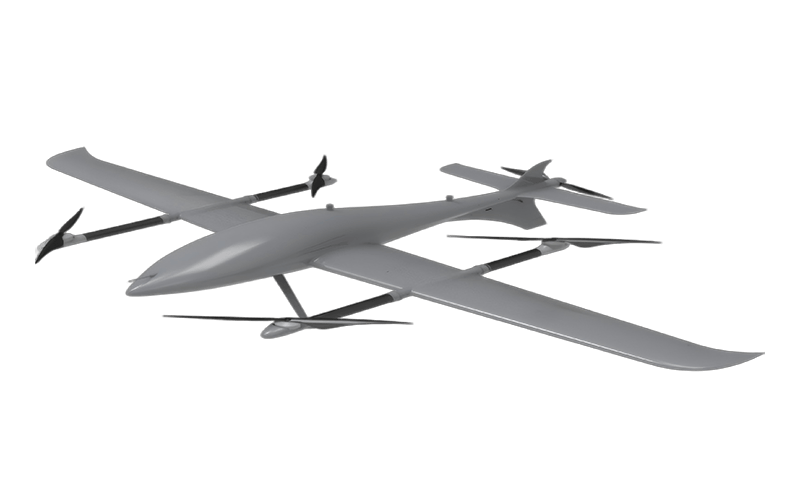 SKY NEXT
SKY NEXT
ມາດຕະຖານ Dragonfish: eVTOL ຫຼາຍພາລະກິດລຸ້ນຕໍ່ໄປ
ເຮືອບິນບໍ່ມີຄົນຂັບ eVTOL ຫຼາຍພາລະກິດ ມາດຕະຖານ Dragonfish
ຄວາມອົດທົນທີ່ສົມດຸນ, ຄວາມຍືດຫຍຸ່ນໃນການຮັບນ້ຳໜັກ ແລະ ການນຳໃຊ້ຢ່າງວ່ອງໄວ ສຳລັບການນຳໃຊ້ດ້ານຄວາມປອດໄພໃນອຸດສາຫະກຳ ແລະ ສາທາລະນະ

ເຮືອບິນບໍ່ມີຄົນຂັບ eVTOL ຫຼາຍພາລະກິດ ມາດຕະຖານ Dragonfish
ຄວາມອົດທົນທີ່ສົມດຸນ, ຄວາມຍືດຫຍຸ່ນໃນການຮັບນ້ຳໜັກ ແລະ ການນຳໃຊ້ຢ່າງວ່ອງໄວ ສຳລັບການນຳໃຊ້ດ້ານຄວາມປອດໄພໃນອຸດສາຫະກຳ ແລະ ສາທາລະນະ
ການບິນທີ່ງຽບສະຫງົບ
ເຮືອບິນ Dragonfish ສາມາດບັນລຸການບິນທີ່ງຽບສະຫງົບເປັນພິເສດຜ່ານລະບົບຂັບເຄື່ອນທີ່ໂດດເດັ່ນ ແລະ ການອອກແບບການຫຼຸດຜ່ອນສຽງລົບກວນທີ່ມີນະວັດຕະກໍາ. แทบจะບໍ່ໄດ້ຍິນສຽງດັງເກີນ 400 ຟຸດ (120 ແມັດ) AGL*, DF ຊ່ວຍຫຼຸດຜ່ອນຄວາມສ່ຽງຂອງການກວດຈັບໄດ້ຢ່າງຫຼວງຫຼາຍ ໃນຂະນະທີ່ຮັບປະກັນຄວາມລັບໃນການດຳເນີນງານ.
ຮຽນຮູ້ເພີ່ມເຕີມ >>

ການບິນທີ່ງຽບສະຫງົບ
ເຮືອບິນ Dragonfish ສາມາດບັນລຸການບິນທີ່ງຽບສະຫງົບເປັນພິເສດຜ່ານລະບົບຂັບເຄື່ອນທີ່ໂດດເດັ່ນ ແລະ ການອອກແບບການຫຼຸດຜ່ອນສຽງລົບກວນທີ່ມີນະວັດຕະກໍາ. แทบจะບໍ່ໄດ້ຍິນສຽງດັງເກີນ 400 ຟຸດ (120 ແມັດ) AGL*, DF ຊ່ວຍຫຼຸດຜ່ອນຄວາມສ່ຽງຂອງການກວດຈັບໄດ້ຢ່າງຫຼວງຫຼາຍ ໃນຂະນະທີ່ຮັບປະກັນຄວາມລັບໃນການດຳເນີນງານ.
ຮຽນຮູ້ເພີ່ມເຕີມ >>
ຕ້ານການແຊກແຊງທີ່ດີເລີດ
ໃນສະພາບແວດລ້ອມທີ່ສັບສົນ, UAV ຍັງຄົງຮັກສາປະສິດທິພາບການສື່ສານ ແລະ ການສົ່ງຕໍ່ວິດີໂອທີ່ດີເລີດ, ໂດຍມີຄວາມສາມາດໃນການຕ້ານການແຊກແຊງທີ່ເຂັ້ມແຂງ ແລະ ການສົ່ງຕໍ່ທີ່ໝັ້ນຄົງ ແລະ ໜ້າເຊື່ອຖື.

ຕ້ານການແຊກແຊງທີ່ດີເລີດ
ໃນສະພາບແວດລ້ອມທີ່ສັບສົນ, UAV ຍັງຄົງຮັກສາປະສິດທິພາບການສື່ສານ ແລະ ການສົ່ງຕໍ່ວິດີໂອທີ່ດີເລີດ, ໂດຍມີຄວາມສາມາດໃນການຕ້ານການແຊກແຊງທີ່ເຂັ້ມແຂງ ແລະ ການສົ່ງຕໍ່ທີ່ໝັ້ນຄົງ ແລະ ໜ້າເຊື່ອຖື.
ເປັນຫຍັງຜູ້ຊ່ຽວຊານຈຶ່ງເລືອກ Dragonfish Standard?

ການປ້ອງກັນການສູນເສຍ GNSS
ເມື່ອປະຕິບັດງານໃນສະພາບແວດລ້ອມທີ່ບໍ່ແມ່ນ GNSS, UAV ຈະເປີດໃຊ້ລະບົບປ້ອງກັນການລົງຈອດ, ໂດຍຈະລົງມາຈາກຕຳແໜ່ງປັດຈຸບັນໂດຍອັດຕະໂນມັດເພື່ອຮັບປະກັນຄວາມປອດໄພ.
ການສົ່ງຄືນແບັດເຕີຣີຕໍ່າ
ຜູ້ໃຊ້ສາມາດປັບແຕ່ງລະດັບແບັດເຕີຣີລົງຈອດທີ່ຄາດໄວ້ໄດ້. UAV ຄິດໄລ່ເວລາກັບຄືນທີ່ດີທີ່ສຸດໃນເວລາຈິງໂດຍອີງໃສ່ລະດັບແບັດເຕີຣີ ແລະ ສະຖານະການບິນໃນປະຈຸບັນ, ຮັບປະກັນວ່າມັນຈະລົງຈອດດ້ວຍລະດັບແບັດເຕີຣີໃກ້ຄຽງກັບຂອບເຂດທີ່ຜູ້ໃຊ້ກຳນົດ.
ການສົ່ງສັນຍານທີ່ສູນເສຍກັບຄືນ
ຖ້າສັນຍານລະຫວ່າງ UAV ແລະ ສະຖານີພື້ນດິນຖືກຂັດຂວາງ, ການປ້ອງກັນການສູນເສຍການເຊື່ອມຕໍ່ຈະເປີດໃຊ້ງານ. ຖ້າມີສັນຍານ GNSS, UAV ຈະເລີ່ມການກັບຄືນສູ່ບ້ານໂດຍອັດຕະໂນມັດ.
ການຍົກເລີກຄູ່ມືສຸກເສີນ
ໃນກໍລະນີສຸກເສີນ, ທ່ານສາມາດປ່ຽນຣີໂມດຄວບຄຸມໄປໃຊ້ໂໝດ M ໄດ້ທຸກເວລາເພື່ອຄວບຄຸມດ້ວຍຕົນເອງທັນທີ, ຮັບປະກັນຄວາມປອດໄພໃນການບິນ.

ການຫຼຸດຈຳນວນພະນັກງານຫຼາຍຄັ້ງ, ຮັບປະກັນຄວາມປອດໄພຂອງພາລະກິດ
eVTOL ມີການຊໍ້າຊ້ອນຫຼາຍລະດັບໃນທົ່ວອົງປະກອບຫຼັກ (ແບັດເຕີຣີ, ເຊັນເຊີ, ລົດເມສື່ສານ) ແລະ ການສະຫຼັບໂໝດອັດຕະໂນມັດ, ຮັບປະກັນການບິນທີ່ໝັ້ນຄົງ ແລະ ປະສິດທິພາບທີ່ໜ້າເຊື່ອຖືເຖິງແມ່ນວ່າຈະຢູ່ໃນສະພາບແວດລ້ອມທີ່ສັບສົນ.
ກວດສອບດ້ວຍຕົນເອງດ້ວຍການແຕະຄັ້ງດຽວ
ກວດສອບລະບົບໂດຍອັດຕະໂນມັດກ່ອນການຂຶ້ນບິນ, ຮັບປະກັນວ່າທຸກໆຖ້ຽວບິນມີຄວາມປອດໄພ ແລະ ໜ້າເຊື່ອຖື.
ກັບຄືນດ້ວຍປຸ່ມດຽວ
ກັບຄືນບ້ານໄດ້ງ່າຍຜ່ານປຸ່ມ Home. ການເກັບຮັກສາທີ່ສະດວກ: ຈັດລະບຽບໄດ້ໄວຫຼັງຈາກການບິນ, ງ່າຍຕໍ່ການເກັບຮັກສາ ແລະ ພ້ອມທີ່ຈະໃຊ້ຄັ້ງຕໍ່ໄປ.
ການຕິດຕາມອັດສະລິຍະ
UAV ສາມາດລັອກເປົ້າໝາຍ ແລະ ປັບເສັ້ນທາງການບິນໄດ້ຢ່າງຍືດຫຍຸ່ນ. ຮອງຮັບຮູບແບບການຕິດຕາມຫຼາຍຮູບແບບ.

ການຂຶ້ນ ແລະ ລົງຈອດຂອງແພລດຟອມມືຖື
ຮອງຮັບການຂຶ້ນ ແລະ ລົງຈອດເທິງເວທີທີ່ເຄື່ອນທີ່.
ລາຍລະອຽດຂອງ Dragonfish Dragonfish Standard
| ລາຍລະອຽດ | ລາຍລະອຽດ |
| ປະເພດ | ເຮືອບິນບໍ່ມີຄົນຂັບ eVTOL ຫຼາຍພາລະກິດແບບອຽງ-ໂຣເຕີ |
| ຂະໜາດ | 1948 × 3295 × 520 ມມ (ລວມທັງໃບພັດ) |
| ນ້ຳໜັກ | 7.5 ກິໂລກຣາມ (ລວມທັງແບັດເຕີຣີ 2 ກ້ອນ, ໃບພັດ; ບໍ່ລວມນ້ຳໜັກກິມບອລ) |
| ຄວາມສາມາດໃນການບັນທຸກນ້ຳໜັກສູງສຸດ | 1.5 ກິໂລກຣາມ |
| ເວລາບິນສູງສຸດ | 126 ນາທີ (ດ້ວຍການຕັ້ງຄ່າມາດຕະຖານຂອງການໂຫຼດ) |
| ຄວາມໄວສູງສຸດຕາມແນວນອນ | 120 ກິໂລແມັດ/ຊົ່ວໂມງ |
| ຄວາມໄວສູງສຸດຕາມແນວນອນ | 126 ກມ/ຊມ (35 ແມັດ/ວິນາທີ) |
| ຄວາມຕ້ານທານລົມສູງສຸດ | 15 ແມັດ/ວິນາທີ (ຮູບແບບປີກຄົງທີ່), 12 ແມັດ/ວິນາທີ (ຮູບແບບການບິນແນວຕັ້ງ) |
| ເພດານບໍລິການສູງສຸດ | 5000 ແມັດ ເໜືອລະດັບນ້ຳທະເລ |
| ອຸນຫະພູມປະຕິບັດການ | -20°C ຫາ 50°C |
| ການຈັດອັນດັບ IP | IP43 |
| ຮອງຮັບ GNSS | GPS + GLONASS + BeiDou + Galileo (ການກຳນົດຕຳແໜ່ງຫຼາຍກຸ່ມດາວ) |
| ຂອບເຂດການສົ່ງສັນຍານສູງສຸດ | 30 ກິໂລແມັດ |
| ເວລານຳໃຊ້ | ≤5 ນາທີ (ປະກອບແບບປ່ອຍໄວໂດຍບໍ່ຕ້ອງໃຊ້ເຄື່ອງມື) |
ການປຽບທຽບຂະໜາດ

ອຸປະກອນເສີມ

ສະຖານີດິນ Dragonfish

Autel Smart Antenna Transmission (ASAT) (ທາງເລືອກ)

Autel Dragonfish Nest (ເລືອກໄດ້)

ເຄື່ອງເຮັດຊ້ຳ Dragonfish (ທາງເລືອກ)
ຜະລິດຕະພັນການປັບຕົວ

ການຕ້ານການລັກລອບຂົນສົ່ງສິນຄ້າຕາມຊາຍຝັ່ງທະເລ

ການບັງຄັບໃຊ້ກົດໝາຍຂອງຕຳຫຼວດ

ການປ້ອງກັນໄຟໄໝ້ປ່າ

ການກວດກາສາຍໄຟຟ້າ

ການກວດກາການຈະລາຈອນ




